Hi Tom,
I finally got our CNC router back together, and I'm still seeing the same behavior I reported earlier.
I have learned a bit more about when this happens.
Our CNC router has 4 stepper motors, 7A max per coil. Two motors are connected to SnapAmp0 (I call them X0 and X1), and those control X movement of the gantry.
Two more motors are connected to SnapAmp1, one each for the Y and Z axis.
I find that if all four motors are connected to the SnapAmps, I get faulting. The interesting part is that if only two motors are connected (two to SnapAmp0 or two to SnapAmp1), then those two motors work without a problem.
Here is a detailed description of the tests I did today:
All of these tests were done with the X motors disengaged from the rack and pinion, so that the gantry didn't move in X, and there was virtually no mechanical load on the X motors. The Y and Z motors were fully engaged, so that as the motors moved, so did the Y and Z mechanisms.
1. I connected the X0 and X1 motors to SnapAmp0 (Y and Z axis motors not connected) and ran the motors successfully. In the end, I put together a small C program that moves the axis back and forth continuously.
2. Then I connected the Y and Z motors to SnapAmp1, leaving the X motors connected to SnapAmp0. After powering up, I ran the initialization program, then enabled *only* axis 0 and 1 (X0 and X1 motors, respectively).
I got faulting as soon as I enabled the motors.
3. I then took the plug for the X0 and X1 motors and connected it to SnapAmp1, instead of SnapAmp0. Y and Z motors were disconnected. I was able to exercise the X0 and X1 motors without a problem using commands for the Y and Z axes 2 and 3.
4. I connected all four motors again to their normal positions (X0 and X1 on SnapAmp0, Y and Z motors on SnapAmp1. This time I enabled the Y and Z axes and got faulting again.
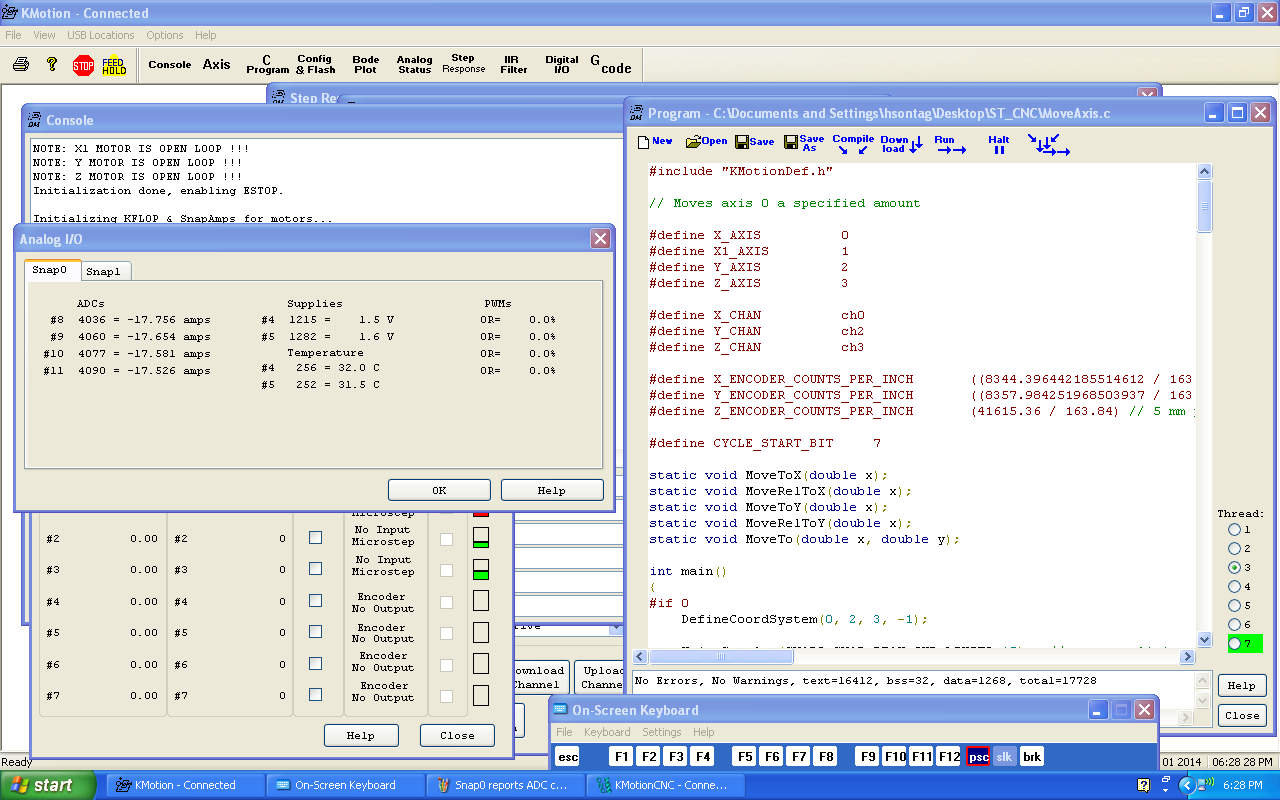
But there's something interesting. The "Analog Status" window showed that SnapAmp0 was exceeding the max current, *** even though the axes on SnapAmp0 were never enabled ***. The current for both axes on SnapAmp1 were within the normal range (less than 7 A for each coil).
I've attached a screen shot of the SnapAmp0 overcurrent, which occurred, as I mentioned, even though the SnapAmp0 axes were never enabled.
-> As an aside, can you tell me why the SnapAmp currents seem to stick at very high levels (but still change somewhat, so the numbers vary but stay very high) after a fault occurs? This occurs even after disabling the axes for that SnapAmp, and even after turning off the power supply, so that there *can't* be any current flowing in the motors.
Prologue - I also measured resistances, again, for the X1 motor coil leads, as I rotated the motor, just to be sure there wasn't an intermittent short internal to the motor. I measured resistance from coil to coil, and also from coil to the motor case. I didn't find any short, although I did measure the expected coil resistance of approx. 0.5 ohm across the coil.
It appears to me that the motors are good (they work fine two at a time), and the wiring, along with being visually inspected and nothing found amiss, electrically measures good. All four motors work properly when run in pairs.
How can we get our CNC router working properly?
Thanks,
Hugh
{kind=link}